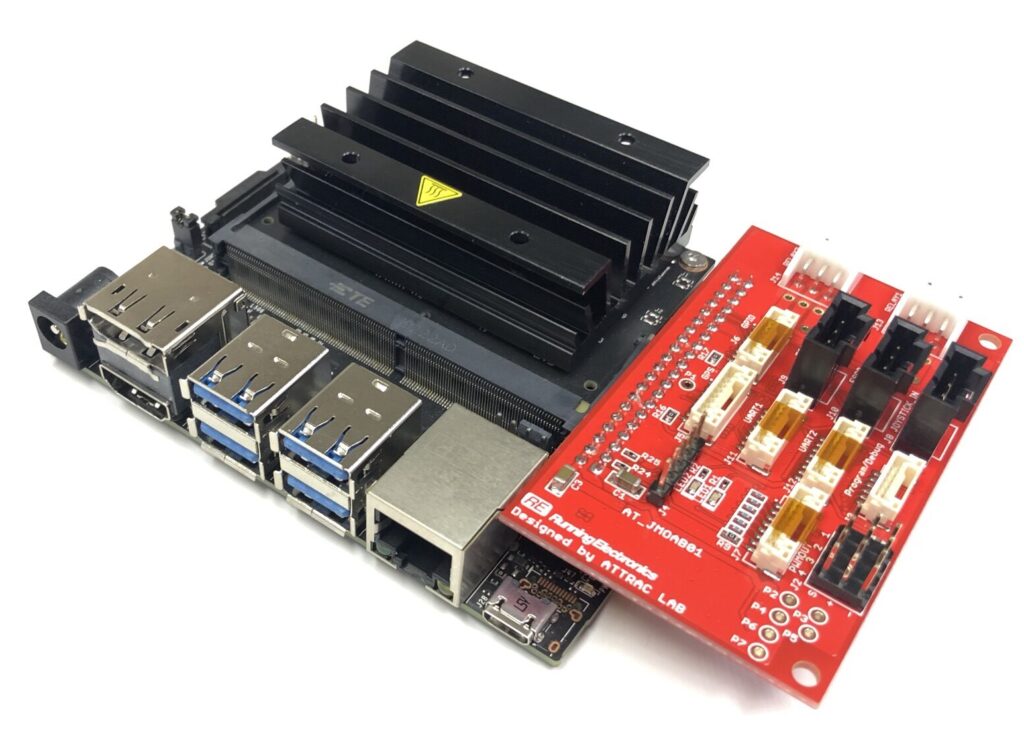
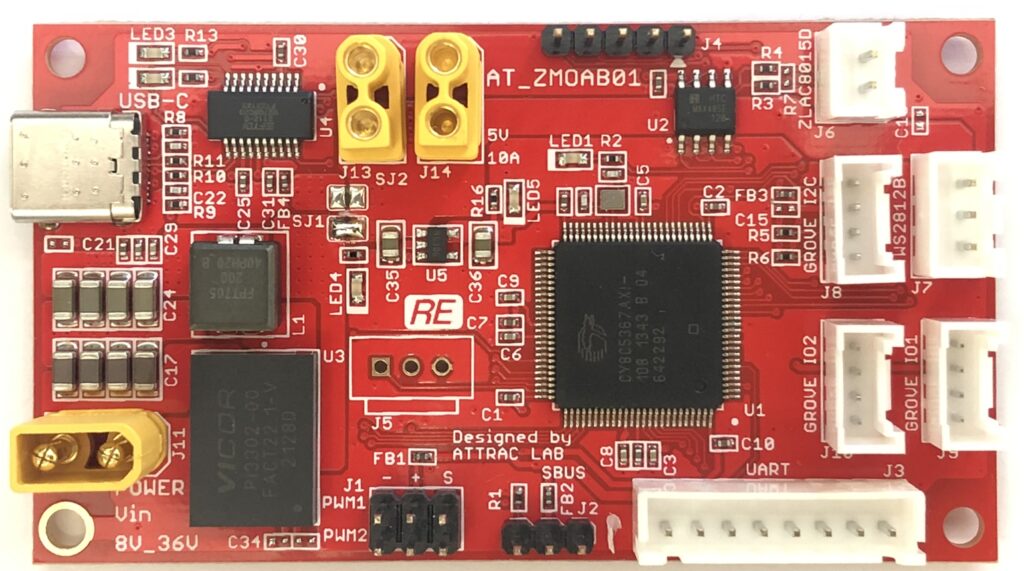
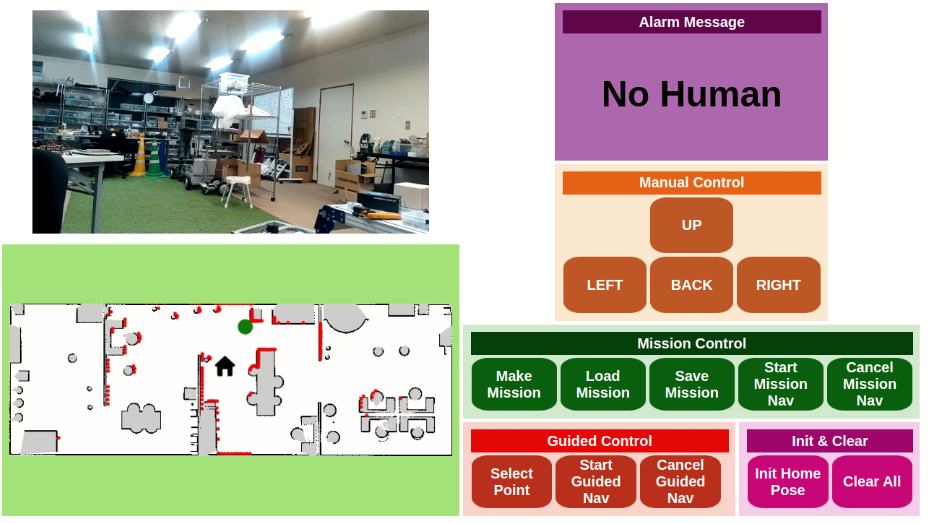
Technologies JMOAB An interface board to use Jetson Nano/Xavier NX/Raspberry Pi for an autonomous robot with ROS package. More detail ZMOAB An interface board to control ZLAC8015D 8 inch in-wheel hub motors. All of data is communicated by ROS topic. More detail naccident Human detection system with distance measuring. This is a security device we provide to construction companies. More detail Webrtc Real time robot control from web-console (web application) by using WebRTC. Media streaming (video + audio) for two way communication and displaying real time data. More detail