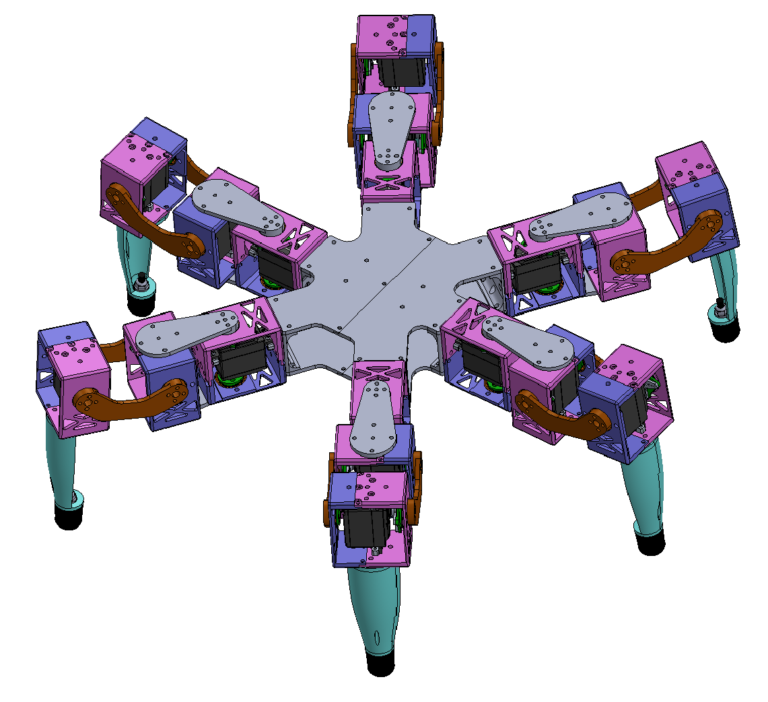
Hexapod is another type of robot to use for surveying applications. Because it’s using legs to move so it’s useful for rough or messy ground, or even climbing stairs or steps.
The first version prototype is made by ESP32, please check more detail in this GitHub repo.
Movement test
Hexapod can move in all direction like omni wheels robot. That’s crab-walking mode, it means the orientation of body doesn’t change during move. It can also rotate in place or steering.
Self leveling control
We put IMU on hexapod’s body, then it could sense the orientation (roll, pitch, yaw). Those could be feedback to the controller to move compensating the motion from ground or disturbance.