Two fingers gripper
This is a self-adaptive two fingers gripper. It was designed for general purpose like picking bottle, fruits, tools or any kind of daily-used object. The design concepts are, all the parts should be simplest as possible, using only one servo for parallel grip and there MUST BE NO linear joints, linear supports or any kind of gears! But why?!
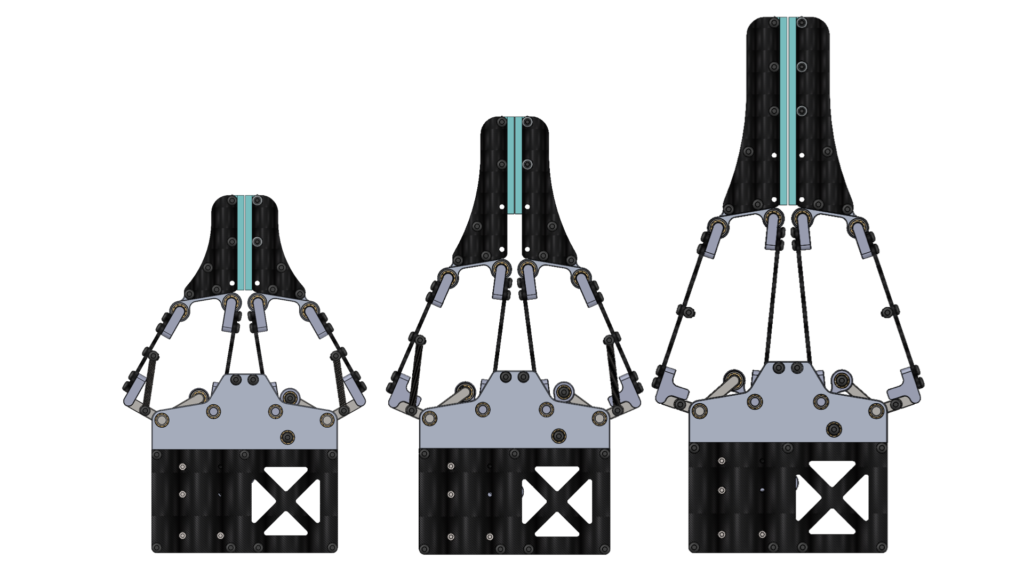
We are trying to design the part that can be easily made from the machine we have (3axes CNC, lath machine, laser cutter, etc) without requires any special machine like gear milling cutter. And also we are just using only ball bearing for rotational joint because the size can be much more compact. As you can see from above image, we can adjust the fingers length as we want, for example I made three types of length, but all types are sharing the same body part, which is quite cost effective for manufacturing. So these concepts are quite good for a robot maker company right us, and also the customer can choose the gripper size to match with their requirements.
The actuator that I am using on this gripper is ROBOTIS Dynamixel servo XM430-W350-R, which can control the torque as well. It’s running in “Current-Based Position control” which going to control the position like regular servo, but if the torque (or current) is reached the goal current, the servo will not go more than that position. And this is quite a good feature to use with robot gripper application.