Here is our custom lawn mower design which can operate in both manual (radio control) and auto (waypoint). Because it’s a custom made so we have many engine options from electric or combustion.
hardware
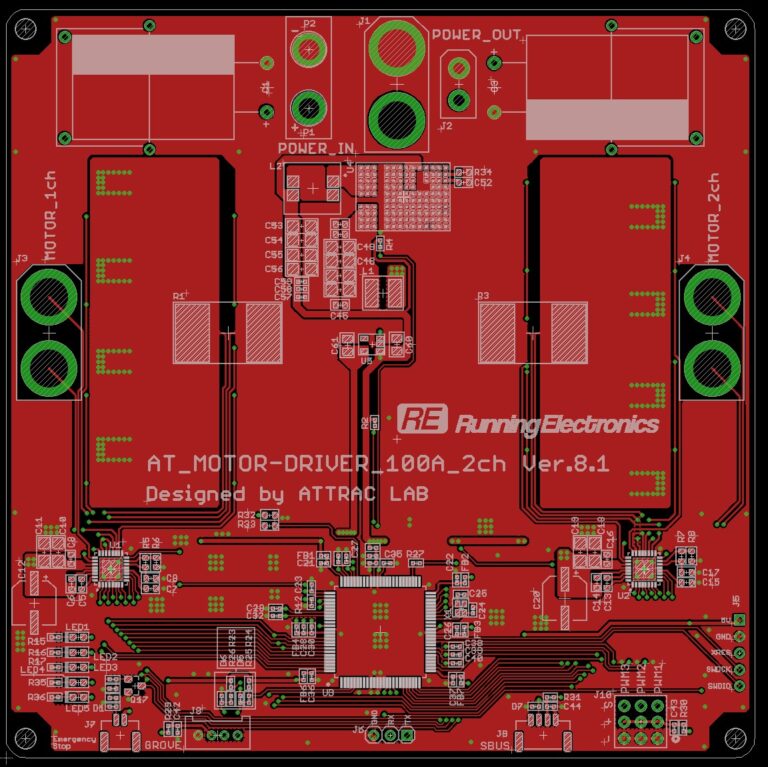
We have designed a special motor driver with high current and able to control by two PWM signals for left and right DC motors. With only this motor driver, we can just plug the radio receiver such as Futaba R3008SB which has SBUS functionality then we can control the cart by using Futaba transmitter!
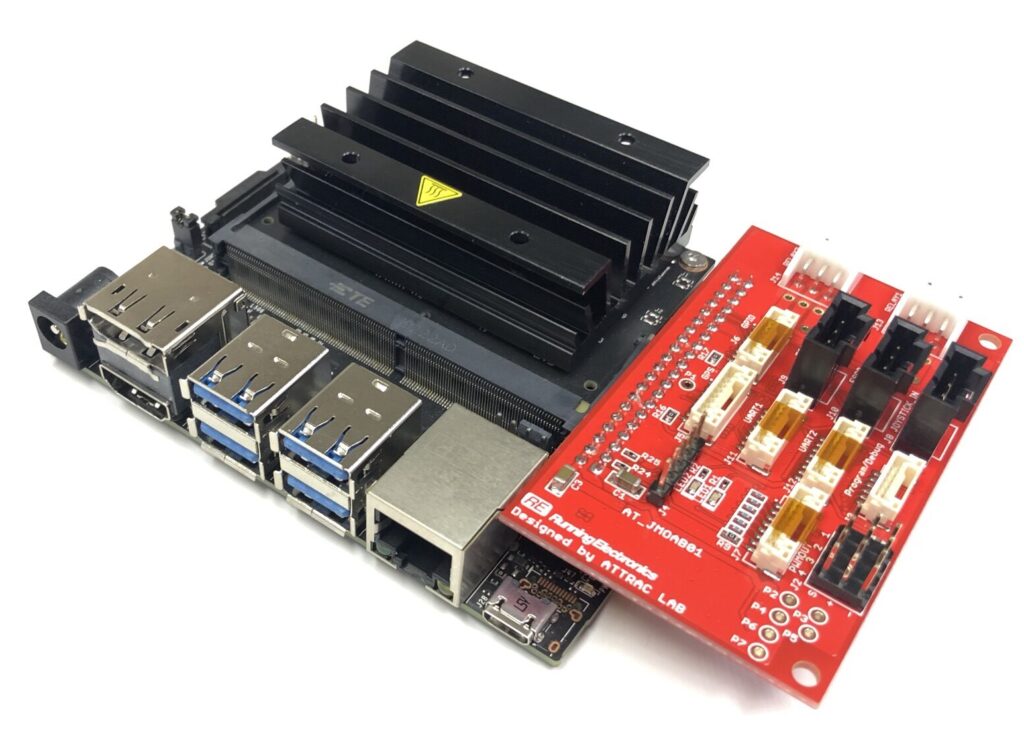
The brain of this lawn mower is from Jetson Nano with JMOAB board. It’s running on ROS2 with our custom atmower-ros2 package. We can simply make a waypoint from APM Planner application from our laptop then send the file to Jetson Nano to update the autonomous drive path. Ofcourse, we can use other method to send mission file; for example; a web application of mission planning page, etc.
With RTK-GPS and IMU+compass, the robot can know its location on the field then next thing is to drive to specified path from waypoints.