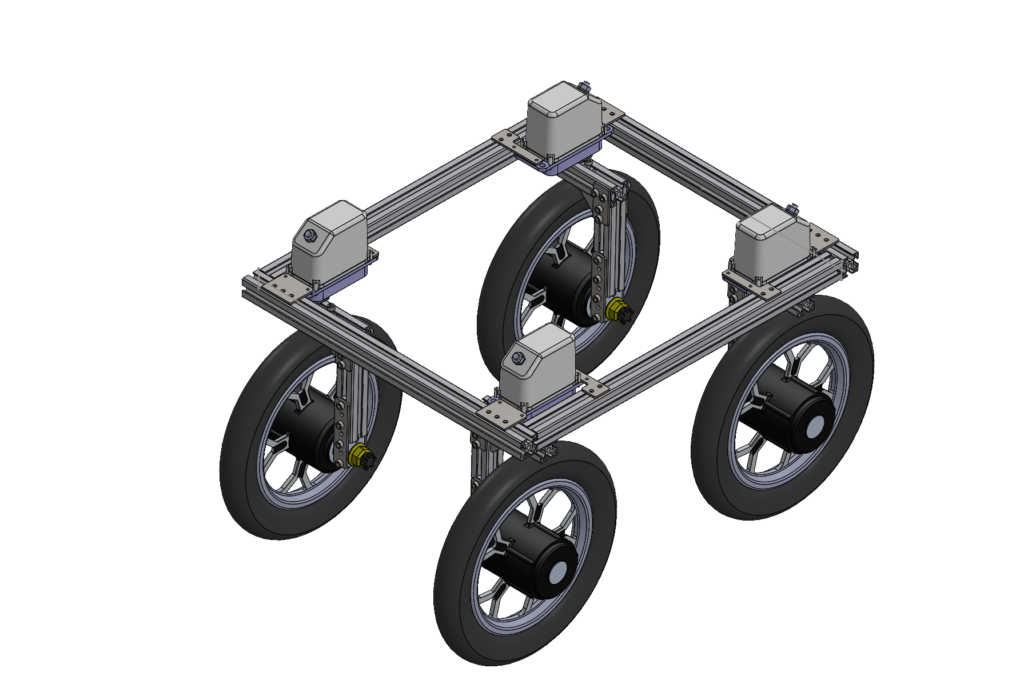
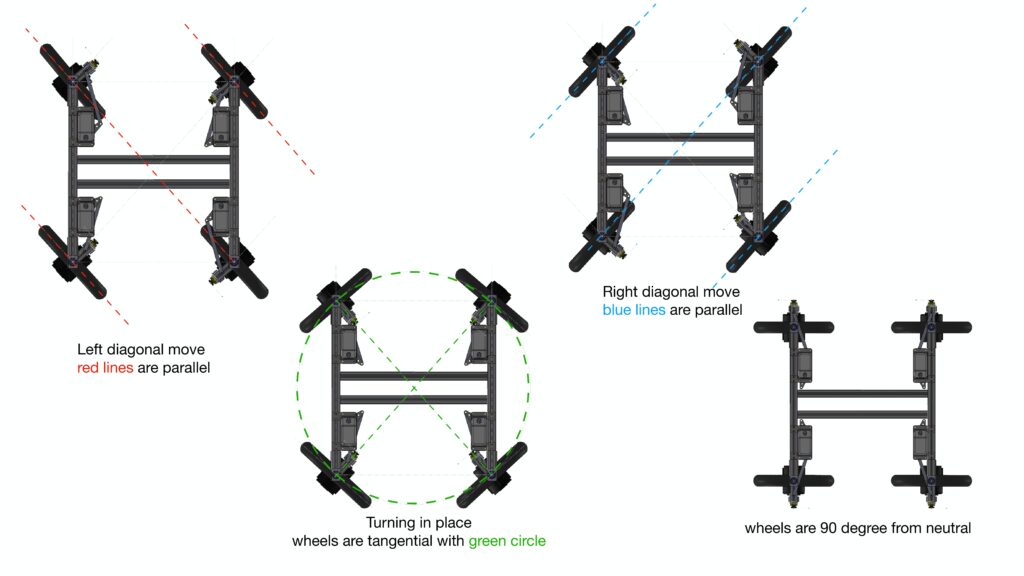
This ATCart type is an experimental project to make a mobile robot which can move in all directional. Each wheel has the servo to control the pointing direction. Basically, we use the double Ankermann steering concept to drive this robot smoothly in curve, and with individual controllable servo, it could move side-way, diagonal, or any defined angle direction. And spinning around itself to change cart orientation.