Avatar robot
This is a proof-of-concept of an Avatar Robot project. The purpose of this robot is to teleoperate the robot with the long range. So to make this long range controlling possible in reality, we are using WebRTC technology to stream the videos and to control the robot over the internet. Which means the operator can be from another side of the world, but he/she can control the robot as long as both sides have an internet access.
Applications
- doctor and infected COVID19 patients
- elderly person who has difficulty to go outside
- disabilities person who has difficulty to go outside
- meeting
- surveying the warehouse
- interactive mascot robot in amusement park
- delivery robot
The robot arm is to use for camera lifting device, in case the operator wants to have much visible area in height, then this robot arm can provide the movement in both depth and height. For more detail about this robot arm, please go check on the P2D arm.
Concept
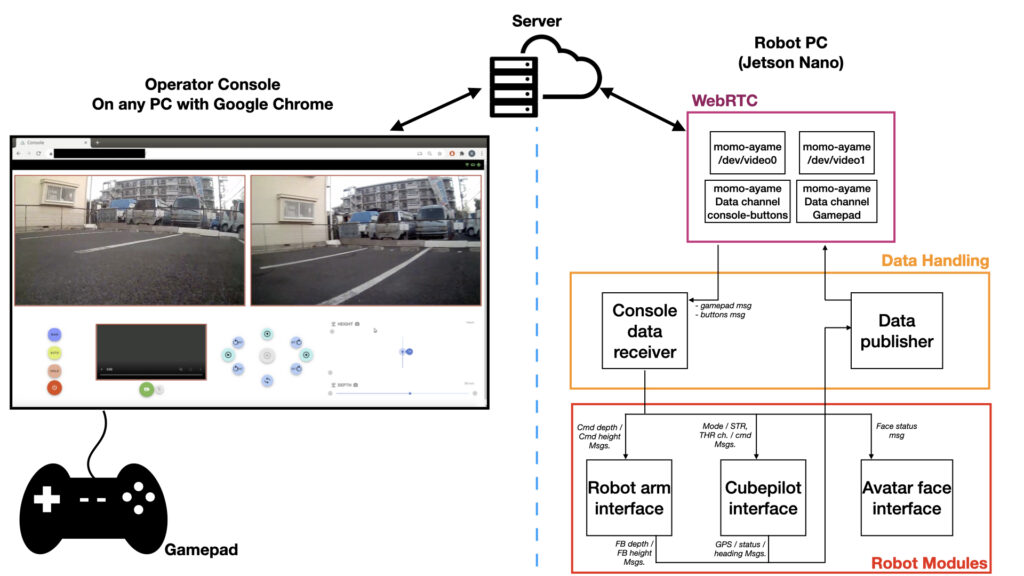
On the web console, we’ve developed the control buttons for many features like Mode-changing (MAN-AUTO-HOLD), turning direction, go straight with specific meters, slider for robot arm’s depth/height. Two cameras streaming can provide a better view for an operator, and also video calling for both sides communication. The main WebRTC that we are using is MOMO, it can provide a data channel and camera channel over the internet. You can easily download the binary file and test on your machine from their GitHub repo.
On Jetson Nano (robot side), we are running four executable momo to send cameras streaming and receive data from web console. The console-data-receiver is the data handling module to give a proper data to each robot module, like flight mode and gamepad analog data will be sent to Cubepilot, slider data will be used for robot arm control. Then we can publish the feedback data like GPS, robot arm’s height and depth back to the console.